|
Another Faux Sinistral Gastropod From The Philippines By Harry G. Lee |
|
 Recently Rick McCarthy, well-renowned, at
least to me, as the finder of a sinistral Vokesimurex
bellegladeensis (E. Vokes, 1963) from the bycatch of a Port Canaveral
scallop boat in 1983, emailed me with a question. He attached a digitized
photo of a pair of cone shells collected in the Philippines to the missive.
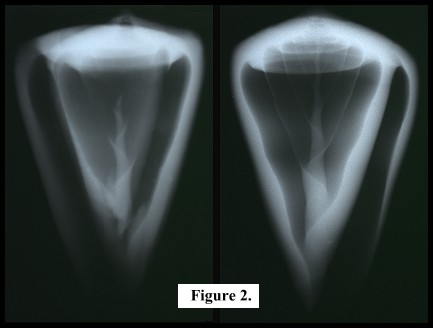
One specimen was left-handed and measured 64 mm. It came from a vendor in
Dumaguete City, Negros Oriental Province and
Rick was a bit suspicious of its legitimacy - in part due to the fact
that a unfamiliar, dense, tenacious periostracum encased almost all the
shell. Furthermore, the shape wasn't particularly characteristic of any
readily-identifiable species. It is depicted in figure 1 alongside a
normal Conus virgo Linnaeus, 1758. Having had a disappointing but
enlightening experience with a faux Sinistral
Cymatium pileare (Linnaeus, 1758), I admonished Rick to obtain an Xray
of the two specimens for analysis of authenticity. Recently Rick McCarthy, well-renowned, at
least to me, as the finder of a sinistral Vokesimurex
bellegladeensis (E. Vokes, 1963) from the bycatch of a Port Canaveral
scallop boat in 1983, emailed me with a question. He attached a digitized
photo of a pair of cone shells collected in the Philippines to the missive.
One specimen was left-handed and measured 64 mm. It came from a vendor in
Dumaguete City, Negros Oriental Province and
Rick was a bit suspicious of its legitimacy - in part due to the fact
that a unfamiliar, dense, tenacious periostracum encased almost all the
shell. Furthermore, the shape wasn't particularly characteristic of any
readily-identifiable species. It is depicted in figure 1 alongside a
normal Conus virgo Linnaeus, 1758. Having had a disappointing but
enlightening experience with a faux Sinistral
Cymatium pileare (Linnaeus, 1758), I admonished Rick to obtain an Xray
of the two specimens for analysis of authenticity. |
|
|
|
|
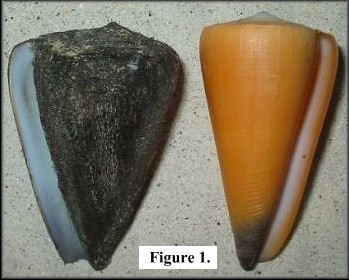
Dr. Paul Kaiser, a chiropractor friend of Rick's performed the radiography, and I received the films in short order. They reveal another instance of counterfeiting! Figure 2 shows the Xray images of two cone shells (the "sinistral" one on the left, a normal Conus quercinus Lightfoot, 1786 on the right). The image of the "sinistral" shell appears to be a "double exposure," quite unlike that of the C. quercinus. Note the spires on each image. That on the left is irregular and offset to the viewer's right. Note the symmetry of the image on the left; it has an "aperture" shadow on both sides of the body whorl. Finally, note that the columellar axis has a clockwise growth pattern in both images. Now look at figure 3, which is an "flipped" (mirror-image) version of the original (normal) C. quercinus image. This is how an authentic sinistral cone shell radiograph should look. How did our crafty artisan fabricate this ruse? Well, the process is rather different that the one employed with the Cymatium pileare, in which three separate shells were cannibalized, and an inverted aperture was installed. Given the cone shell's near perfect bilateral symmetry, one need only bisect a larger shell lengthwise and shell out all but the dorsal half of the body whorl (like eviscerating a grapefruit). This produces a topless cone with a "lip" on each side. A somewhat (maybe 20%) smaller dextral example can then be inserted into the (viewer's) right side of the cavity thus created. There has to be a bit of filing of the new "lip" (viewer's left), etc., with caulking to follow, but I think you can see how this proceeds. There will always be that slight asymmetry of the spire, but a generous slathering of "periostracum" (as with the C. pileare) will conceal most of the careful handiwork. I thank Rick McCarthy for providing all the images used here, and for his unflagging pursuit of all kinds of sinistrals. |
|